-
Design and build a reliable open-source physical robotic platform for multi-agent learning and control research at an acceptable cost.
-
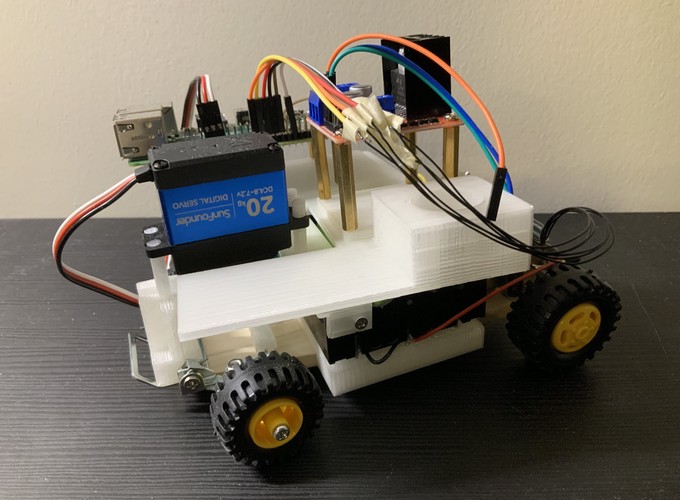
Designed and built (with 3D printer) two kinds of mini-robots based on Arduino-like MCU, and NVIDIA Jetson.
-
Implemented a very robust and precise localization and speed detection algorithm to perceive the environment information for the traffic planning. with a central camera, infrared cameras, and onboard tracking tags.
-
Built the communication network among the controlling server, the central camera, and 20 mini-robots via ROS
-
Transferred learning from simulations to this controlled robotic platform to validate the effectiveness of the Deep Reinforcement Learning based control design of Flow framework
 Multi control of mini-robots
Multi control of mini-robots